安徽移动搬运复合机器人设计
柔性复合机器人是一种度集成,结合多种技术得型科技产品,只要由协作机器人、AMR自主移动机器人、视觉系统、末端夹持系统及控制系统等多部分组成,其中,AMR自主移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体得综合机器人系统。它集中了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,目前已的应用于工业、农业、医疗、服务等行业。协作机器人,是一种能够与人协同工作的型工业机器人,协作机器人以轻量、安全、易操作、编程简单为特点,已的应用在工业、服务业等行业。视觉系统包括2D视觉系统、3D视觉系统,根据应用场景的不同,为智能机器配置不同的视觉方案,配合移动机器人解决机器人精确定位的问题,从何实现如CNC上下料等这类的精度应用。达明机器人(上海)有限公司致力于提供复合机器人,有需要可以联系我司哦!安徽移动搬运复合机器人设计

手脚眼并用”的复合机器人的优势有哪些呢? 一:提生产过程中的自动化水平复合机器人有利于提原材料配件的传送、工件的装卸以及机器的装配等自动化程度,从而可以提劳动生产效率,降低生产成本,加快实现工业生产机械化和自动化的步伐。二:改善劳动条件、避免人身事故的发生复合机器人即可部分或全部代替人安全地完成恶劣环境下的危险作业,地改善工人的劳动条件。同时,一些简单但又繁琐的搬运工作可以由复合机器人来代替,可以避免由于人操作疲劳或疏忽而造成损失。三:生产线的柔性化复合机器人完成了一道工序就可以进行下一道工序,具有较的灵活性。并且多台复合机器人组成移动的装配台、加工台使用,可形成度柔性生产线。长春移动搬运复合机器人价格复合机器人,就选达明机器人(上海)有限公司,欢迎客户来电!
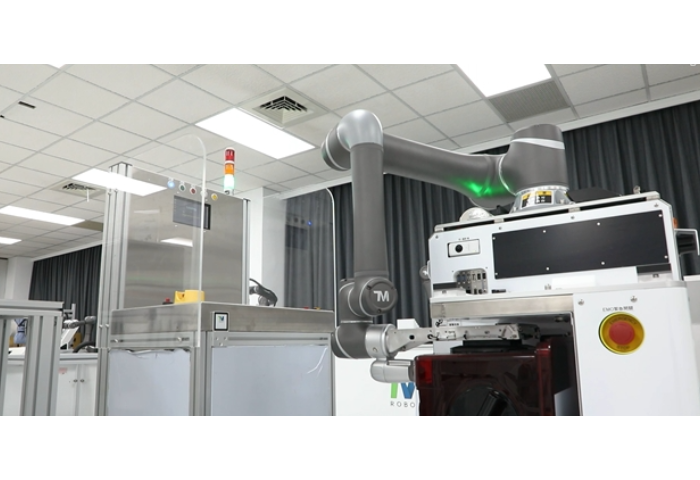
根据其系统结构特点,复合机器人由三大部分组成。 移动底盘:即复合机器人的“腿”,用于实现复合机器人在不同方向上的灵活移动。一般使用移动机器人(AGV/AMR)本体。 机械臂:复合机器人的“手”,实现复合机器人对物件的抓取或加工的操作。一般使用协作机器人本体。 终端控制器:相当于复合机器人的大脑部分,可以直接或者通过人工对机器人的动作进行控制。相当于对移动机器人的控制部分与协作机器人的控制部分做了一定程度的集成。拥有“手脚”两项功能的复合型移动机器人能够很好地解决当下半导体行业人工搬运震动值大导致原料损耗、人工搬运不稳定影响综合稼动率,导致产能浪费的问题,未来的应用前景非常之大。
复合型机器人(Hybrid Robot)是一种结合了多种机器人技术的综合性机器人系统,包括机械臂、移动平台、传感器、视觉系统、人工智能、控制系统等,具有复杂的动作控制和度智能的特点,可以适应多种复杂环境,并完成多种任务。复合型机器人的应用范围非常,包括制造业、物流和仓储、医疗保健、教育和娱乐等领域。例如,复合型机器人可以用于汽车生产线上的机械加工和装配、仓库和物流中的货物运输和分拣、医疗保健中的手术和康复等。达明机器人集成创夹具及视觉,即使在非结构化环境中,达明机器人也能识别、拾取各种物体,部署于复杂度更的自动化生产流程中。且达明机器人易于编程,用户更可以通过其示教器快速部署任务,非常适合小批量应用以及重复性任务。达明机器人(上海)有限公司复合机器人值得用户放心。

在众多兴行业里,半导体可谓是市场关注的焦点,因为相较于人工,移动机器人效率更,且不会像人体一样产生灰、粉尘等污染物;此外,半导体行业具有精度、集成的特点,传统制造装备无法提供柔性生产,这也使得以移动复合机器人为的智能制造装备在半导体行业中备受青睐。平稳取放,非常适用于医疗及半导体等行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性、精度的应用致力于研发和应用自动化科技,以创的自带智能视觉结合手臂,加上AI+人工智能系统,手眼脑合一,提升机器人能力、弹性与易用度,协助企业大幅降低导入自动化人力与时间成本。达明机器人(上海)有限公司复合机器人获得众多用户的认可。大负载复合机器人联系电话
达明机器人(上海)有限公司为您提供复合机器人,期待您的光临!安徽移动搬运复合机器人设计
一般复合机器人应用场景较为复,在特定场景下不仅需要进行挪动运送上料任务,又需要添加生产线担负实际技术工种加工的实际操作,因而,复合机器人针对AGV小轿车环境适应能力具有很的规定。复合型运送机器人机械手臂包括了多骨关节机器人、直角坐标系机器人、SCARA机器人及协作机器人等,相对来说,AGV+协作机器人(也称之为复合机器人)更加精细化管理,可以可用更加复杂、精密的生活环境,可以穿行各种各样应用场景而且做相对性工作,相对性传统式机器人更加效,深受销售市场关心。安徽移动搬运复合机器人设计
上一篇: 重庆灵活识别复合机器人控制
下一篇: 浙江包装复合机器人配件