河北中空编码器种类及型号
编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式和两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。经过在实际应用效果来看,完全可以代替多圈编码器从而达到既实现了功能,又节约了成本的效果。河北中空编码器种类及型号
电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对值编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。通常,绝对式编码器的码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道。绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。编码的设计可采用二进制码、循环码、二进制补码等。它的特点是:可以直接读出角度坐标的绝对值;没有累积误差;山东尼康编码器哪家质量好尼康在去年5月公布的中期经营计划(Chukei)中,重点关注机器人领域。未来机器人行业的需求基础将扩大。
但作为解决未来劳动力短缺和多品种小批量生产等生产问题的手段,协作机器人可以满足这样的需求,帮助人类在人机共存的应用场景中发挥作用。因此,协作机器人正在逐步引起人们的关注,并在更多的领域被投入适用。作为机器人类型之一是在装配工作和运输过程中,与人类在同一空间中协同工作的“协作机器人”。机器人无处不在的社会支持制造业的工业机器人伴随工业制造升级,必将进一步发展。迄今为止,从安全方面来看,人类和机器人一直在完全隔离的环境中工作,
据两者关系判断出它的变化方 向,从而产生‘正向’或‘反向’输出脉冲。当某道由于振动在‘高’、‘低’间往复变化 时,将交替产生‘正向’和‘反向’脉冲,这在对两个计数器取代数和时就可消除它们的影响(下面仪器的读数也将涉及这点)。由此可见,时钟发生器的频率应大于振动频率的可能 最大值。由图4还可看出,在原一个脉冲信号的周期内,得到了四个计数脉冲。例如,原每圈脉冲数为1000的编码器可产生4倍频的脉冲数是4000个,其分辨率为0.09°。实际上 ,目前这类传感器产品都将光敏元件输出信号的放大整形等电路与传感检测元件封装在一起,所以只要加上细分与计数电路就可以组成一个角位移测量系统(74159是4-16译码器)。使用我们公司的绝对值编码器,是一款非常易于安装和现场更换的编码器,可直接替换增量式编码器安装.

编码器工作原理 冲编码器:APC 增量脉冲编码器:SPC 两者一般都应用于速度控制或位置控制系统的检测元件. 旋转编码器是用来测量转速的装置。它分为单路输出和双路输出两种。技术参数主要有每转脉冲数(几十个到几千个都有),和供电电压等。单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组相位差90度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。 增量型编码器与编码器的区分 编码器如以信号原理来分,有增量型编码器。 增量型编码器 (旋转型)它有助于设备和电机的精确和高速控制。通过与以往机型共用,扩大客户的电机选择范围。安徽MC52编码器应用领域
没有累积误差;电源切除后位置信息不会丢失。但是分辨率是由二进制的位数来决定的,就是说精度取决于位数。河北中空编码器种类及型号
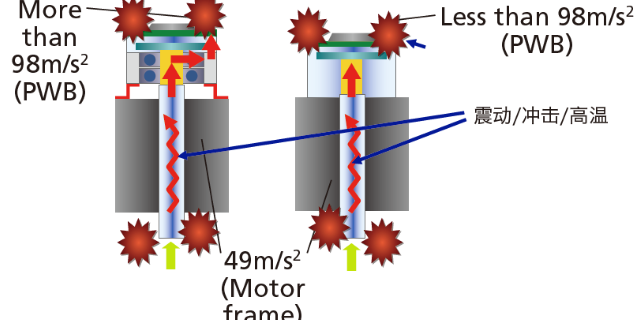
(二)改进措施1.改变光电编码器的安装方式。光电编码器不在安装在电动机外壳上,而是在电动机的基础上制作一固定支架来安装光电编码器,光电编码器轴与电动机轴中心必须处于同一水平高度,两轴采用软橡胶或尼龙软管相连接,以减轻电动机冲击负载对光电编码器的机械冲击。采用此方式后经测振仪检测,其振动速度降至1.2mm/s。2.合理选择光电检测装置输出信号传输介质,采用双绞屏蔽电缆取代普通屏蔽电缆。双绞屏蔽电缆具有两个重要的技术特性,一是对电缆受到的电磁干扰具有较强的防护能力,因为空间电磁场在线上产生的干扰电流可以互相抵消。双绞屏蔽电缆的另一个技术特点是互绞后两线间距很小,两线对干扰线路的距离基本相等,两线对屏蔽网的分布电容也基本相同,这对抑制共模干扰效果更加明显。河北中空编码器种类及型号
上一篇: 广西尼康编码器有几种型号
下一篇: 上海MC43编码器一级代理