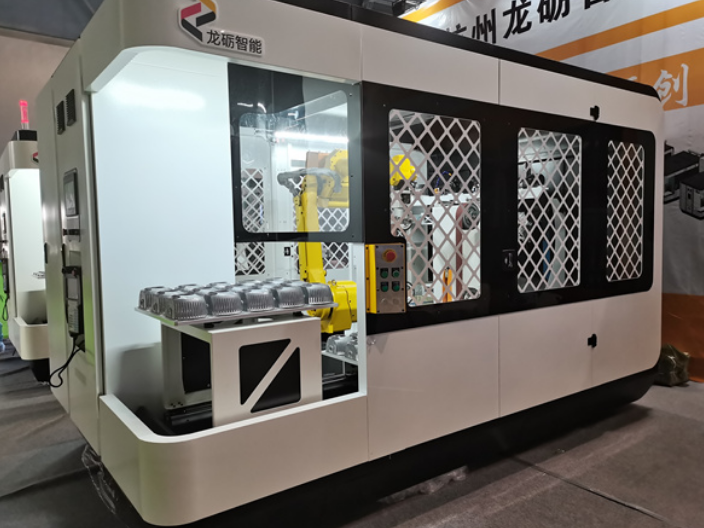
湖北铝压铸件全自动打磨机
机器视觉是打磨机器人中不可或缺的一项技术,它能使机器人看到和理解物体的形状和位置。通过使用相机和图像传感器,机器人可以获取工件的实时图像,并进行图像处理和分析,以确定打磨位置和路径。机器视觉技术的应用可以提高机器人的精确性和灵活性,使其能够适应不同形状和尺寸的工件。打磨过程中,对力度的控制是非常重要的,过大的力度可能导致物体损坏,而过小的力度则无法达到所需的效果。因此,打磨机器人需要配备力传感器,以实现对力度的准确测量和控制。通过力控技术,机器人可以实时调整打磨力度,确保每次打磨的质量和一致性。打磨机器人在工业制造领域有着广阔的应用。湖北铝压铸件全自动打磨机
打磨
机器换人技术的应用不仅提高了生产效率,更重要的是,它为企业带来了全方面的安全保障。从改善工人的工作环境,到提升生产现场的整体安全水平,自动化生产线的引入都是一次积极的变革。随着技术的不断进步,我们有理由相信,未来的工业生产将更加安全、高效、环保。相较于传统的抛光打磨专机,机器人抛光打磨的应用展现出了更高的灵活性。对于广大的中小型制造业企业来说,市场的外部环境要求他们遵循订单批次的生产模式。这意味着生产线必须根据每个订单批次的需求进行相应的调整。在这方面,专机往往需要进行大规模的改动,这既费时又费力。南通机器人打磨抛光系统打磨机器人具有长时间连续工作能力和低运营成本。
打磨机器人具备高精度和一致性,可以按照预定的程序进行打磨,不会因为个体差异导致质量不一致的情况发生。机器人还可以通过传感器等设备实时监测打磨效果,及时调整打磨参数,确保产品的质量符合要求。尽管打磨机器人的投资和维护成本较高,但它们能够提高工作效率和产品质量,进而降低人力成本和生产损耗。与此同时,机器人的使用寿命较长,可靠性较高,可以为企业长期节约成本。在一些强度高、高风险或特殊环境下的打磨工作中,由于工人数量有限或人力难以满足需求,打磨机器人能够填补人力缺口,确保工作的持续进行。这对于提高生产效率和满足市场需求具有重要意义。
连续轨道操控则更注重打磨机器人在达到目标点的过程中所遵循的路径。这种操控方式要求机器人能沿着预设的连续路径进行精确的运动,从而实现对复杂形状和曲面的精确打磨。因此,连续轨道操控通常用于需要高精度、高稳定性的打磨任务中。力(力矩)操控则是一种更高级的操控方式,它要求打磨机器人在作业过程中能根据实时的力反馈进行动态调整,以实现对不同材质、不同表面状况的工件的精确打磨。这种操控方式需要机器人具备高度灵敏的力感知和反馈系统,以及强大的实时处理能力。由于机器人的操作精度高,可以准确地控制打磨的力度、速度和方向,从而确保产品在各个方面的质量一致性。

在制造业中,抛光打磨这一环节虽然基础,但其在整个生产流程中占据了相当重要的位置,成本甚至可以达到总成本的30%。这一环节对工人的体力和耐力有着极高的要求,因为涉及到长时间、强度高的手工操作。为了提升生产效率、降低成本,并确保产品质量的一致性,抛光打磨机器人的应用变得至关重要。抛光打磨机器人不仅可以替代2至6名工人,还能以每天超过20小时的工作时长持续作业,不受疲劳、情绪波动或其他人为因素的干扰。这种高效的工作模式使得机器人的生产效率远超人工,甚至可以达到人工的3至5倍。打磨机器人在工作过程中会积累粉尘、油污等杂质,这些杂质会影响机器人的正常运行。扬州机器人打磨公司
机器人打磨技术可以通过精确的控制和自动化的操作,提高产品质量,并大幅提高生产效率。湖北铝压铸件全自动打磨机
在位置控制模式下,机器人会精确地按照预先设定的位置轨迹进行运动。然而,当机器人在运动过程中遇到障碍物并因此产生位置追踪误差时,它会试图通过增加作用力来追踪预设轨迹,这可能会导致机器人与障碍物之间产生巨大的内力。这种内力不仅可能损坏零件,还可能对机器人的结构造成损害。相比之下,力控制模式则更加注重机器人与障碍物之间的作用力控制。当机器人遇到障碍物时,力控制模式会智能地调整其预设位置轨迹,以消除由于障碍物产生的内力。这种调整确保了机器人与障碍物之间的作用力保持在安全范围内,从而避免了可能的损害。湖北铝压铸件全自动打磨机