金华吸尘打磨设备
力控技术的精度和反馈速度对于产品的打磨效果具有决定性的影响。如果力控技术不够精确或反应不够迅速,那么打磨效果就可能受到影响,导致产品无法达到预期的质量标准。因此,要想实现金属工件的高效自动化打磨,就必须解决机器人力控技术的问题。虽然自动化打磨技术具有诸多优势,但在实际应用中仍需要解决一些技术难题。其中,如何精确控制打磨力度是一个关键的问题。只有通过不断的技术创新和研发,我们才能攻克这一难题,实现金属工件的高效、安全、稳定的自动化打磨。选购打磨机器人时我们需要考虑打磨机器人的性能参数。金华吸尘打磨设备
打磨
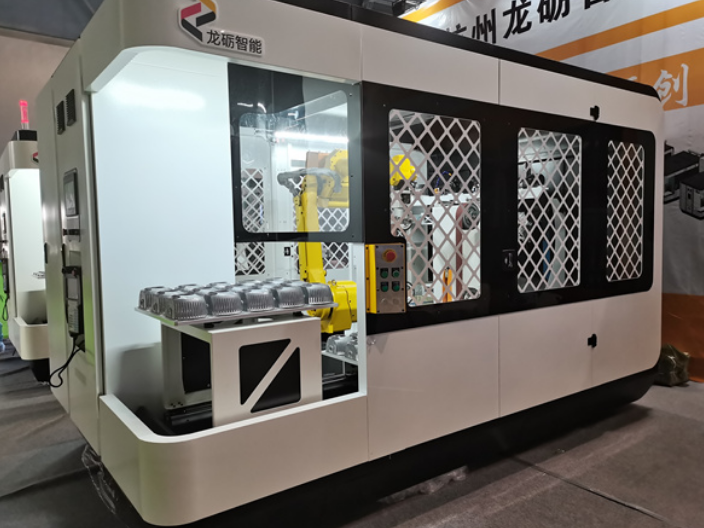
值得一提的是,智能打磨机器人还具备强大的存储功能,能够存储多种叶型的打磨程序。当需要更换叶型时,操作员只需在自动打磨前选择正确的打磨程序,系统便能迅速适应新的叶型需求,实现无缝切换。这种快速适应的能力,使得打磨机器人能够轻松应对各种复杂的生产环境。智能打磨系统还配备了高效的自动吸尘功能。在打磨过程中,系统能够吸收90%以上的粉尘,并将这些粉尘集中收集到70升的集尘箱中。操作员可以根据实际情况,定期清理集尘箱,保持工作环境的整洁和卫生。这一自动吸尘功能不仅降低了粉尘对操作员健康的影响,还提高了工作效率和生产质量。自动化打磨机设备厂家供应打磨机器人能够在不需要人员直接参与的情况下完成工作,减少了工人的健康风险。
直驱力控方式则是通过协作机器人各个关节采用直流电机驱动,电流与转矩成正比。通过精确控制电流的大小,机器人能够实现对力的精确控制。这种方式的主要优点在于防碰撞和拖曳示教功能,使得机器人在作业过程中更加安全可靠。基于力控技术的打磨抛光机器人为现代制造业带来了变革性的变革。通过选择合适的力控方式,机器人不仅能够高效地完成打磨任务,还能确保作业质量,为企业创造更大的价值。机器人在执行与环境产生力交互的任务,例如打磨和装配等,单纯依赖位置控制可能会导致过大的作用力,这可能会对零件或机器人本身造成伤害。为了确保在这些受限环境中的安全有效运动,机器人需要配合力控制来进行操作。
连续轨道操控则更注重打磨机器人在达到目标点的过程中所遵循的路径。这种操控方式要求机器人能沿着预设的连续路径进行精确的运动,从而实现对复杂形状和曲面的精确打磨。因此,连续轨道操控通常用于需要高精度、高稳定性的打磨任务中。力(力矩)操控则是一种更高级的操控方式,它要求打磨机器人在作业过程中能根据实时的力反馈进行动态调整,以实现对不同材质、不同表面状况的工件的精确打磨。这种操控方式需要机器人具备高度灵敏的力感知和反馈系统,以及强大的实时处理能力。打磨抛光机器人在制造业中扮演着关键的角色。

对于需要在受限环境中与环境产生力交互的机器人任务,结合位置控制和力控制是非常必要的。这样不仅可以确保机器人能够精确地执行其任务,还可以保护机器人和周围环境免受潜在伤害。打磨,作为一种普遍应用的表面改性技术,对于提升产品质量和性能具有关键性作用。传统的打磨方法主要依赖人工完成,但这种方法效率低下,工作周期长,且精度难以保证,导致产品的一致性和均一性受到严重影响。人工去毛刺的过程中,不仅噪音大、速度慢,而且会产生大量粉尘,对操作人员的健康构成严重威胁。打磨机器人的成本包括购买成本、维护成本和所需的培训成本。台州打磨工作平台
打磨机器人的使用寿命较长,可靠性较高,可以为企业长期节约成本。金华吸尘打磨设备
在实际的生产过程中,由于工件材质的多样性和复杂性,工件成型所涉及的工艺也各不相同,包括钣金、冲压、铸造、注塑、CNC等多种方式。这些不同的材质和成型方式会导致工件在尺寸上存在一定的公差,尽管这些公差可能只是数据大小上的差异。然而,正是这些微小的差异,使得机器人打磨技术的应用变得尤为重要。通过精确的编程和高度灵活的机械臂,机器人能够精确地识别和处理这些微小的尺寸差异,确保每一件产品都能达到预期的打磨效果。在当今市场中,打磨机器人已成为应用普遍且技术较为成熟的机器人之一。其之所以能得到如此普遍的应用,主要归功于其多样化的操控方式。根据作业任务的不同,打磨机器人主要可以分为四种操控方法:点位操控、接连轨道操控、力(力矩)操控和智能操控。接下来,我们将详细解析这些操控方法的功能要点。金华吸尘打磨设备
上一篇: 湖南全自动去毛刺打磨机
下一篇: 广东自动打磨抛光机