惠州4轴机器人打磨
华数机器人优势:(1)系统体系架构:自主可控采用国际标准EtherCAT总线技术,支持总线式伺服驱动单元和***式伺服电机;配备新一代HsPad示教器,方便用户示教操作;可通过网关设备接入Profinet等工业以太网,实现控制器与外部PLC的数据通信;(2)高速高精控制基于动力学建模及精确参数辨识,实现力矩前馈控制;全局智能轨迹优化策略,实现比较好控制性能;多种加减速策略控制与平滑功能(3)安全基于动力学模型的柔顺拖动示教;无传感器的碰撞检测技术;与传感器结合的警戒模式与协助模式灵活的安全区设置与一键回原点;(4)易用调试工具:完备的参数调试与诊断工具,基于命令的终端调试;仿真工具:虚拟控制平台、3D仿真平台;(5)开发丰富的二次开发接口,通过命令行交互;动态库嵌入,可加载客户自定义模块;已成功接入各种传感器,视觉传感器、力矩传感器、稳定传感器等。(6)智能与航天云网合作开展面向智能决策的云服务平台,基于大数据分析模型、深度学习在华数机器人上实现部分人工智能技术,比如评估机器人健康状态,提供关键部件智能保养与失效预警功能;基于多样本对比模型,进行机器人运行时能效优化。同时未来将开放智能平台部分接口。 四轴SCARA机器人是指选择性装配关节机器臂,即四轴机器人的手臂部分可以在一个几何平面内自由移动。惠州4轴机器人打磨

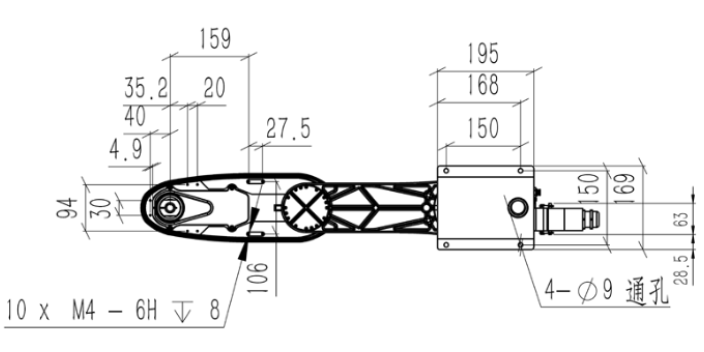
HSR-HC403小四轴高防护机器人,在传统SCARA结构形式上进行创新突破!更具有结构优势和精度优势!可以完成几乎所有Scara机器人所能完成的工作,同时其耐冲击、高防护、易安装、无死角的特点赋予了HSR-HC403更使用可能。HSR-HC403机器人整机采用高防护设计,整机防护性能达到IP67,可满足在高湿度、油类,酸、碱性切削液等恶劣工况环境中正常使用,阻隔机器人本体内部与外界杂质交互,避免因工作环境造成故障停机,尤其适用于3C行业中的搬运、分拣、装配等应用场景。同时华数该款机器人还针对应用场景进行了设计延伸,设计不同安装方式结构,**提升机器人应用灵活性。在“人有我有,人无我有”的优势下,HSR-HC403采用华数自研驱控一体,产品整体保持了极高性价比,具备充分的市场竞争能力。惠州4轴机器人流水线跟踪点胶3C电子产品尤其是手机产品对于精细的要求日益增加,自动化成为发展必然趋势。

四轴机器人:有两个移动关节和一个转动关节,末端操作器的安装轴线的位姿由(z,r,θ)坐标予以表示,其主体具有3个自由度:腰部转动、升降运动、手臂伸缩运动。SCARA机器人是一种圆柱坐标型的特殊类型的工业机器人,主要适用于处理高速和高重复性的工作任务,广泛应用于3C电子、包装、平面装配、检测等领域。优缺点:1)运行速度快,精度高;2)应用执行动作简单,可实现快速编程调试;3)结构简易化,成本低;4)安装空间小,轻松简易地结合外部,进而打造出精简、高整合性的机器人工作站。缺点:1)负载较小;2)臂展行程较短。
SCARA工业机器人市场需求: SCARA系统在x,y方向上具有顺从性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作,例如将一个圆头针插入一个圆孔,故SCARA系统首先大量用于装配印刷电路板和电子零部件;SCARA的另一个特点是其串接的两杆结构,类似人的手臂,可以伸进有限空间中作业然后收回,适合于搬动和取放物件,如集成电路板等。SCARA工业机器人还广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。它的主要职能是搬取零件和装配工作。它的***个轴和第二个轴具有转动特性,第三和第四个轴可以根据工作的需要的不同,制造成相应多种不同的形态,并且一个具有转动、另一个具有线性移动的特性。由于其具有特定的形状,决定了其工作范围类似于一个扇形区域。 3C、新能源等新兴行业的需求越来越大,促使SCARA机器人在电子制造等轻小型消费品制造领域销量持续上升。
SR系列四轴工业机器人产品特性:一、SR系列四轴工业机器人结构特性SCARA是一种圆柱坐标型的特殊类型的工业机器人,SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,用于完成末端件在垂直于平面的运动。SCARA系统在x、y方向上具有顺从性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作。其串接的两杆结构,类似人的手臂,可以伸进有限空间中作业然后收回,适合于搬动和取放物件。我司研发生产的四轴机器人、四轴机械手、SCARA机器人、水平关节机械手应用于各种行业的装配作业。东莞4轴机器人高防护
“四轴机器人”是指“选择性装配关节机器臂”,即四轴机器人的手臂部分可以在一个几何平面内自由移动。惠州4轴机器人打磨
协作机器人优缺点:一、优点:1)人机协作:充分发挥人与机器人的优势,依靠人解决精度及模糊控制问题,依靠机器人解决力控及稳定性能问题;2)安全性高:采用先进的传感器,主动感知和适应变化的环境,控制算法添加防碰撞功能,规避与外部碰撞风险;3)灵活易用:协作机器人主要突破点为软件控制系统,实现简便操控、编程;小型、轻巧、可移动、安装方便、即插即用。二、缺点: 1)负载低:一般在10kg以下;2)结构刚性弱:较小的自重导致刚性不足;3)速度慢:协作机器人要确保安全性,其电机需要兼顾安全保护的功能;4)重复定位精度:相比传统机器人一般低一个数量级;5)价格较高:为达到安全标准,还需要增加很多的安全传感器。惠州4轴机器人打磨
深圳市旗众智能科技有限公司一直专注于国内贸易,货物及技术进出口;运动控制系统软件、上位机软件方案、总线运动控制系统、运动控制工具平台的研发设计与销售;信息系统软件设计、集成、运行维护;信息技术咨询;,许可经营项目是:机械设备、五金产品、电子产品类研发生产和销售;集成电路设计、研发、生产和销售。,是一家机械及行业设备的企业,拥有自己**的技术体系。一批专业的技术团队,是实现企业战略目标的基础,是企业持续发展的动力。公司业务范围主要包括:视觉点胶系统,点胶软件,点胶控制系统,辅料贴附系统等。公司奉行顾客至上、质量为本的经营宗旨,深受客户好评。公司凭着雄厚的技术力量、饱满的工作态度、扎实的工作作风、良好的职业道德,树立了良好的视觉点胶系统,点胶软件,点胶控制系统,辅料贴附系统形象,赢得了社会各界的信任和认可。