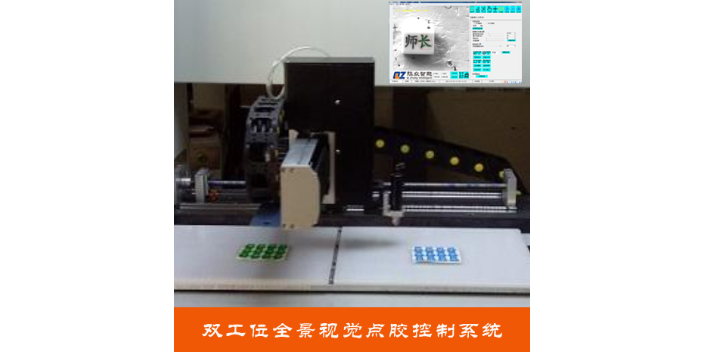
双平台视觉点胶系统咨询
视觉点胶是建立在传统非视觉点胶基础之上,减小了点胶机因外界因素带来的轨迹偏差,从而令点胶轨迹的稳定性、一致性和精度有了保证。视觉点胶通过视觉控制抓拍到产品的偏移量,以通讯的形式发送给运动控制器,运动控制器使用这些偏移量来进行轨迹补偿,这就是市场上,视觉点胶实现轨迹纠偏的常规做法。1.精密产品点胶更有效视觉点胶机和普通点胶机设备的区别就是带有CCD视觉系统,有了视觉系统的加入,便可实现更智能的识别产品、自动定位,达到更为精密、精确的点胶效果,非常适合用于需要精密点胶的复杂场合。2.视觉智能识别,自动引导点胶CCD视觉系统,是用于工业检测及识别的高科技产品,可采集加工品的高清图像直接传输图像数据到点胶机系统,这个功能应用在点胶机设备上,可有效替代人工校对的工序或治具,CCD智能识别产品位置和点胶范围,实现自动引导点胶功能。3.视觉点胶精度更高市面上的点胶机,大多需要治具对产品的固定定位,治具的制造若出现误差,这对点胶效果也会造成很大影响,而且治具的成本也较为昂贵,每更换一个产品又需重做不同的治具;而视觉点胶机则不需要,产品可随意摆放,大幅节约时间和治具成本,视觉点胶系统精度可达。高效胶水点胶技术使得视觉点胶系统成为电子工业的不可或缺之物。双平台视觉点胶系统咨询
视觉点胶系统的成本因多种因素而异,包括系统的规模、复杂度和功能。这些系统通常由多个组成部分组成,包括视觉传感器、胶水喷头、控制器和软件等。较简单的视觉点胶系统需要具有较低的成本。例如,一个基本的系统需要只包括一个简单的2D视觉传感器、单一胶水喷头和相应的控制器,需要在几千到数万美元的范围内。高级的视觉点胶系统具有更高的成本,因为它们通常具有更复杂的功能和更精确的定位能力。这些系统需要包括3D视觉传感器、多个喷头、多轴运动控制以及更先进的软件算法等。这样的系统需要需要数十万美元到数百万美元不等的投资。总体而言,具体的视觉点胶系统成本取决于项目需求和要求的精确程度。为了获取准确的成本估计,建议与供应商或专业厂商进行咨询,以便根据特定项目的要求获得定制的报价。双平台视觉点胶系统咨询视觉点胶系统的实时检测功用能够迅速发现问题并及时调整,提高了生产效率。

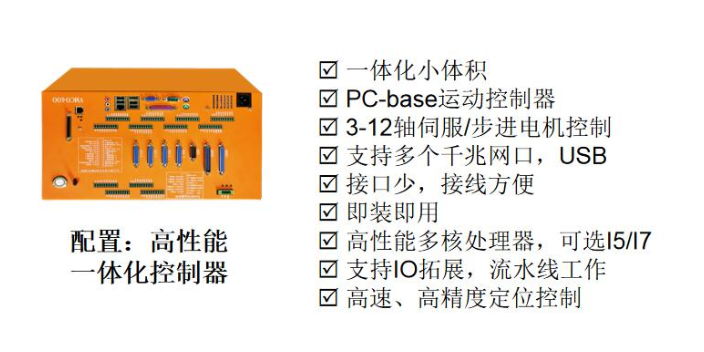
选择旗众的几点理由好的产品,能够为您提供令人满意的使用体验。旗众智能有着近十年的点胶行业经验,为设备制造商提供较好的运动控制与机器视觉产品,我们所提供的集运动控制+机器视觉+点胶软件一站式整体解决的方案,可以帮助您提高生产效率和产品质量。1.运动控制方面,旗众为您提供一体化控制器,无需按照传统方式采用控制卡+端子板+PC电脑的接线方式,即插即用2.机器视觉方面,由博士工程师统筹,根据您设备结构,为您选配合适的高清工业相机镜头,全程指导相机光源安装3.点胶软件方面,旗众凭借深耕点胶行业多年经验,结合全方面的点胶工艺方案,不断升级与完善点胶软件,走在行业前端
操作人员在设置视觉点胶系统的相关参数时,需要考虑以下几个因素:产品要求:根据具体的点胶产品要求,包括涂胶位置、胶水体积、涂胶路径等方面的要求。操作人员需要了解产品的设计要求,以便正确设置视觉点胶系统的参数。工艺要求:不同的点胶工艺需要需要不同的参数设置。例如,点胶速度、压力、烘烤时间等。操作人员需要根据具体的工艺要求设置相关参数,以确保点胶质量和效率。图像处理:视觉点胶系统利用图像处理技术进行图像分析和特征识别。操作人员需要了解图像处理算法的原理和参数设置的意义,以便根据实际情况进行调整。例如,图像的亮度、对比度、滤波等参数可以影响点胶系统的性能。环境因素:操作人员还需要考虑工作环境的光照条件、背景干扰等因素。这些因素需要会影响图像的质量和准确性,从而影响点胶系统的性能。操作人员可以根据实际情况进行光源调整、背景处理等操作,以提高系统的稳定性和精度。在电子制造领域,视觉点胶系统能够准确应用胶水,保证产品质量。
在设计视觉点胶系统的路径时,需要考虑以下几个因素:点胶位置:首先确定点胶的目标位置,即将胶水应用到工件上的具体的位置。这需要考虑点胶的精度要求、工件的形状和尺寸等因素。点胶位置的准确性对于点胶系统的路径设计非常重要。动作顺序:确定点胶系统的动作顺序,包括运动路径和点胶动作之间的先后关系。操作人员需要考虑先后顺序,以确保点胶过程的连续性和有效性。通常,点胶路径设计应尽量避免重复移动和不必要的停顿。路径规划:路径规划是确定点胶系统如何从起始位置移动到目标点胶位置的过程。在路径规划中,需要考虑路径的非常短、非常快或较好化等目标,并避免与工件或其他障碍物的碰撞。例如,可以使用路径规划算法,如A*算法、Dijkstra算法等,来自动规划较好路径。视觉点胶系统的可视化操作界面使操作更直观,方便操作人员使用。流水线跟踪视觉点胶系统供应商
摄像头和激光传感器是视觉点胶系统中关键的硬件组件,确保准确的胶水点胶。双平台视觉点胶系统咨询
视觉点胶系统通过以下步骤来确定点胶的位置和路径:图像获取:系统使用摄像头或激光传感器获取工作环境中的图像信息。这些图像可以是工件表面的照片或激光扫描得到的三维点云数据。图像处理:系统使用高效的图像处理软件对获取的图像进行分析和处理。图像处理可以包括噪声过滤、边缘检测、形状匹配等算法,以提取出图像中的特征信息。特征识别:系统对处理后的图像进行特征识别,包括识别工件的形状、大小、位置以及其他关键特征。这些特征可以通过比较图像中的特征与预设的模板或标准来进行匹配。点胶位置计算:基于识别到的特征信息,系统计算点胶的位置。这通常涉及到将图像中的特征坐标映射到工件的实际坐标系中,以确定点胶的目标位置。双平台视觉点胶系统咨询
上一篇: 浙江在线式点胶系统软件
下一篇: 广州高精度点胶系统价格