湖南快速目标识别
而要实现这些功能,无人机就需要搭载光电吊舱。慧视光电开发的VIZ-100T三轴三光目标定位吊舱将10倍光学变倍可见光相机,640×512高分辨率红外相机,测程1.2km半导体激光测距机集于一体,能够远距离高倍变焦实现管线巡检时高清成像,在夜晚,专业高灵敏度的红外热成像传感器,也能实现夜间目标细微可察,温度检测直观精细。在环境复杂恶劣的条件下,吊舱还能通过三轴高稳定精度平台框架实现高精度惯性稳定,360°连续无遮挡,精细测距。用什么设备能够轻松识别目标?湖南快速目标识别
目标识别
成都慧视光电这样致力于AI图像处理板开发的企业,经过多年的领域深耕,已经具备了完善的AI图像处理板的开发流程,能够根据行业特性提供适用的解决方案。在人形机器人领域,AI图像处理板的精确度、高效、性能是决定人形机器人工作能力的关键指标,慧视光电利用瑞芯微高性能芯片RK3588开发而成的Viztra-HE030图像处理板正是这个领域的解决方案。板卡拥有四大四小八核处理器,总算力高达6.0TOPS,经过我司的高度开发,能够支持丰富的输出接口,再通过定制的目标识别类算法,就能够实现精细的定位、识别检测等功能。青海数据目标识别编号RK3399pro芯片的图像处理板能够进行目标检测。
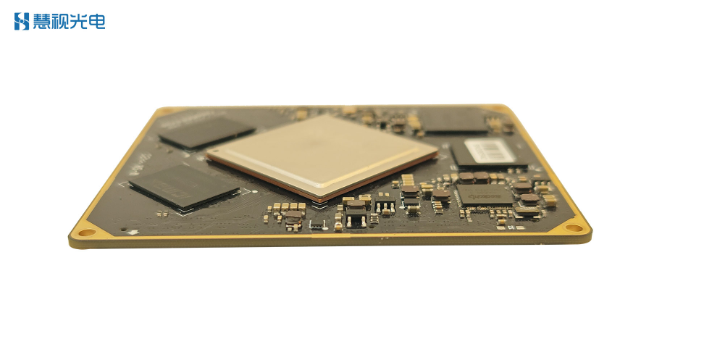
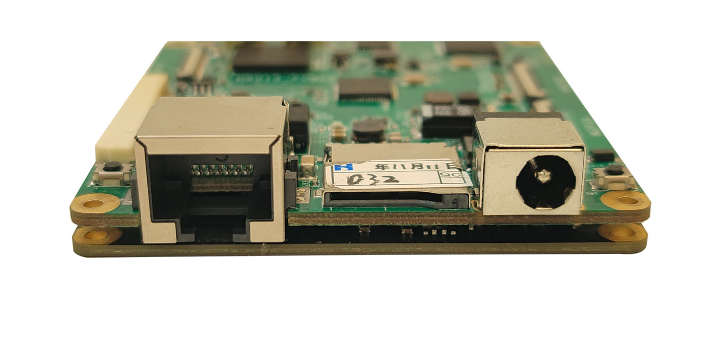
性能强劲的RK3588可为各类AI应用场景带来更强大的性能表现。植入公司自主研发的智能图像算法后,基于输入的可见光或者红外的视频流,可实时对目标进行自主检测、识别,并自动或人为选择目标进行锁定、跟踪,同时输出目标相对于视野中心的脱靶量信息。设备支持2路SDI(可见光)视频输入;1路CVBS(红外)视频输入;1路SDI视频输出;1路CVBS视频输出;1路网络视频输入/输出。产品电路部分共有两块 PCB 构成,分别为:核心板、电源接口板。核心板和电源接口板通过 B2B 连接器连接,并使用铜柱将整套 PCB 板固定,铜柱的高度为 7.5mm。
YOLO系列算法是目标识别领域很重要的技术之一,因为性能强大、消耗算力较少,一直以来都是实时目标检测领域的主要范式。该框架被用于各种实际应用,包括自动驾驶、监控和物流等行业的目标识别。自今年2月YOLOv9发布以后,清华又推出了YOLOv10,作为计算机视觉领域的突破性框架,具备实时的端到端目标检测能力,通过提供结合效率和准确性的强大解决方案,延续了YOLO系列的传统。据悉,YOLOv10在各种模型规模上都实现了SOTA性能和效率。例如,YOLOv10-S在COCO上的类似AP下比RT-DETR-R18快1.8倍,同时参数数量和FLOP大幅减少。与YOLOv9-C相比,在性能相同的情况下,YOLOv10-B的延迟减少了46%,参数减少了25%。慧视多光无人机吊舱可以内置AI图像处理板。
无人机之所以能达到防火的目的,得益于无人机轻巧、灵活的特点,远程高空侦查时,通过变倍放大就能够查看某处的具体场景。这还只是基础的功能。如果在无人机上加装具备高清摄像头的吊舱,再在吊舱内加装AI图像处理板,无人机便可实现智能化。当无人机升空后,能够在算法的赋能下,对目标区域进行AI目标识别。这种方式适用于专门的山林防火,效果突出。这类无人机吊舱在市面上就有很多,慧视光电推出的微型双光吊舱,内置高性能的AI图像处理板以及可见光和红外两种传感器,即便是在夜晚也能够通过红外光实现目标识别、跟踪的功能。整个吊舱重量*有280g,不会过多增加无人机的负荷和功耗,有效维持续航。成都慧视开发的用于目标识别的图像处理板怎么样?四川无源目标识别定制
哪些板卡适合用于目标识别?湖南快速目标识别
传统的除草模式采用人工割草或者撒农药,这些模式繁琐,效率不高,并且农药对土地的污染也会很严重。于是机器人智能除草的产品被研发应用,哈工大机器人实验室与华工科技合作研发的一台全天候智能激光除草机器人,就以“环境零污染、土地零破坏、昼夜作业”为目标。激光除草是通过激光照射杂草,使草叶内部细胞脱水破裂死亡的物理靶向除草方法。哈工大机器人实验室与华工科技合作研发的全天候智能激光除草机器人集成深度学习的人工智能技术,AI智能识别杂草,十分高效;同时针对性开发先进的多目标靶点定位及动态时延误差补偿算法,不仅能够准确高效识别杂草和高精度定位目标分生组织,同时不损伤作物、不污染土壤、不耗费人力,而且适应性强,生产效率高,促进农业经济高质量发展。湖南快速目标识别
上一篇: 重庆运动轨迹图像识别模块识别
下一篇: 云南图像识别模块研发