江苏法如激光跟踪仪校准
这个工作实现的是通过交互点完成两者的转换。将靶球座固定安放在激光跟踪仪和手持式扫描仪都能测量到的位置,分别将同等直径的激光跟踪仪靶球和扫描仪扫描球放在上面,无论怎么转动两个靶球,它们球心的坐标值是重合的,从而来实现激光跟踪仪对手持式扫描的精度校准。当然一个交互点的位置是不够的,需要安放多个交互点,使得精度更进一步的提高,通常情况下会选用4个交互点。苏州捷慧智能测量科技有限公司当然不同的工件形状、不同的尺寸大小、不同的精度要求,会采用不同的交互点布局,以达到提高精度、节约成本、提高效率的目的。这种方法目前已经被风电叶片的扫描、汽车外形的扫描、飞机的外形与机翼扫描、船舶、航天、重工、铁路、雷达、机械制造等行业采用。激光跟踪仪的稳定性是指仪器在长时间使用过程中保持测量精度的能力。江苏法如激光跟踪仪校准
将①或②的位姿态准确度测试结果与标定前的位姿态准确度测试结果进行比较,可以对比得到标定的效果。同时,为规范行业发展,还需要有专业的第三方检测机构对机器人的性能指标、机械电气安全进行检测,协助企业制定检验方法以及完善相关的标准体系建设。沃德检测是民营机器人检测认证机构,集检测、检验、认证、验货、技术培训、实验室建设和资质申请为一体的综合性第三方公共服务平台。目前开展的与机器人相关的业务有:机器人性能评估、安规、EMC、功能安全与风险评估、零部件测试等等。芜湖二手激光跟踪仪靶球激光跟踪仪主要用于百米大尺度空间三维坐标的精密测量。

对待测目标高精度的测量检测测量目的:进一步提升对目标物的测量精度。激光跟踪仪作为一种微米(μm)级别精度的测量仪器,其测量精度已得到众多高精尖制造行业或研究所的认可,并已广泛应用于全球各重点工程和国家项目中。单台激光跟踪仪已经可以实现超高精度的测量,但在某些对测量精度有着更加严苛要求的精密工程中,我们可以使用多台激光跟踪仪联动测量的方式,让测量精度进一步提升。苏州捷慧智能测量科技有限公司欢迎您的咨询。
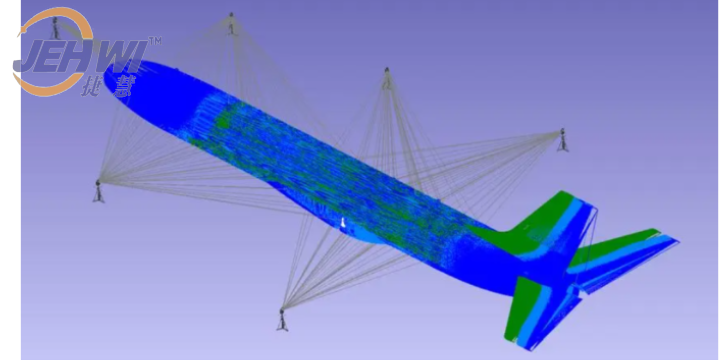
跟踪仪是一种测量仪器,主要用于完成半径80米以内超大型工件的测量、调整、定位的任务,通俗来讲就是一台便携式三坐标测量机,其基本原理是从仪器主机发射出一道稳定地激光束,投射到光学靶球的中心,实现对标靶球中心位置的跟踪,光学靶球相当于三坐标测量机的测头,对工件进行形位公差和尺寸公差的测量。由于利用光学靶球的测量是接触式测量,在逆向工程及非接触测量模式下,有一定的局限性,因此我们开发了激光扫描仪作为补充。手持式三维激光扫描仪经过优化,可满足产品开发和设计人员的需求,为其提供可靠的方法来采集物体的3D测量数据,实现对目标点坐标的快速采集。激光跟踪测量系统基本都是由激光跟踪头(跟踪仪)、控制器、用户计算机、反射器(靶镜)及测量附件等组成。

从而导入其他产线。使用激光跟踪仪,不但能检测单个工件的合格率,同时也能指导现场工装的精细安装。激光跟踪仪可通过检查大梁安装孔的位置,计算大梁基准面与安装位置间的距离偏差,来快速判断大梁产品是否合格。而通过检测与大梁搭配的滚轴相对于基准平面的距离尺寸,还能实现对设备现场装配时的安装指导,极大的提高了安装效率和安装精度。另外,该系统还能实时提供内容丰富的检测报告,既可用于数据记录,也能实现后续的查验分析。激光跟踪仪的配件有国产的吗?苏州高精度激光跟踪仪
激光跟踪仪精度一般是多少?江苏法如激光跟踪仪校准
工业机器人6维动态精度的实时监测测量目的:对工业机器人的精度进行6维动态追踪监测,从而更好地评估工业机器人在其运动路径上各个位置的空间精度,并依据数据对机器人进行相应的数据补偿与工作路径优化。测量过程:在工业机器人末端安置跟踪仪靶球支架,并在支架上布置3个靶球(SMR),三台激光跟踪仪各自跟踪一个靶球,并对该靶球在机器人运动过程中的各个位置进行实时动态采集测量。采集到的数据反馈至PC或笔记本电脑进行计算,并作为该机器人标定补偿的数据支撑。江苏法如激光跟踪仪校准
上一篇: 青浦区便携式激光跟踪仪标准球
下一篇: 泰州激光跟踪仪靶球