江苏高速无人船艇
12月4日,青岛轨道交通产业示范区管委会主任秦青松一行到访广东华中科技大学工业技术研究院、广东省智能机器人研究院,就新型研发机构产学研合作平台的规划思路、发展情况展开了深入调研和交流。秦青松一行实地参观了由耿涛带领的无人自主技术创新研究团队工作实验室,耿涛博士重点介绍了无人艇先进技术和研发成果,充分肯定了无人艇的装备、产品性能指标及产业化成果。目前,该团队已创办了“小豚智能”产业化公司。成熟的研发技术已正式面向市场,并取得了一定的社会效益。无人船喷水推进器将电机产生的动力转变成船舶行进的推力,以克服船舶在水中航行的阻力,推动船的行进。江苏高速无人船艇
无人船艇
无人船艇可以用于海上救援和打捞任务。在遇到海上事故或沉船事件时,无人船艇可以迅速到达现场,通过搭载的声纳设备进行水下搜索和定位,找到失踪人员或沉船的位置。
此外,无人船艇还可以搭载专门的打捞设备,如潜水器和抓斗,对沉船进行打捞和修复,提高海上救援和打捞的效率和安全性。四、海洋渔业和水产养殖无人船艇可以用于海洋渔业和水产养殖。
它们可以搭载专门的探测设备,如声纳和红外线相机,对海底地形和鱼类分布进行探测和分析,帮助渔民确定捕捞地点和时间。此外,无人船艇还可以搭载专门的养殖设备,如网箱和水草种植器,提高水产养殖的效率和产量。
水上交通和航道管理无人船艇可以用于水上交通和航道管理。它们可以搭载高精度GPS和北斗导航系统,自动航行在河流、湖泊和海洋中,进行航道巡逻和维护。此外,无人船艇还可以搭载专门的交通管理设备,如AIS系统和雷达,对船舶进行跟踪和管理,提高水上交通的安全性和效率。 多功能无人船艇怎么用推进器还可以防止水中的一些水草的缠绕,能够减少故障的发生,而且该推动器的维护也比较方便。

2018年1月,全自主无人艇HUSTER-68在松木山水库成功首航。该产品克服了“颠簸大”“通讯弱”“易掉队”等问题,实现多无人艇的协同编队,可用于多艇协同巡逻和多艇围捕任务,技术达国内先进水平。一年后,团队又实现了国内先进机艇自主协同运动起降。2020年3月,团队提交发明专利30项并顺利“毕业”,远超原定目标;7月,耿涛带领工程成员创立小豚智能,成为国内先进的无人船行业应用解决方案供应商。在产品展示区,耿涛坐上一架远程控制台,结合眼前电子显示器实时呈现的画面,便能便捷操控远在湖面上航行的无人艇。
随着技术的不断进步和创新,无人船艇将会在未来发挥更加重要的作用。
未来发展趋势包括以下几个方面:技术升级:随着人工智能、物联网、5G等技术的不断发展,无人船艇将会具备更强的自主导航、远程操控、感知能力等。同时,无人船艇的建造材料也将不断优化,提高其耐用性和可靠性。应用拓展:随着无人船艇技术的不断成熟和市场需求的不断增加,其应用领域也将不断拓展。例如,在海洋渔业、海洋工程、海洋考古等领域,无人船艇都将发挥重要作用。规范制定:随着无人船艇的广泛应用,其规范制定也将会逐渐完善。
国际海事组织(IMO)和各国将会制定更加严格的法规和标准,确保无人船艇的安全和合规运营。跨界合作:未来无人船艇的发展将需要跨界合作,包括航运业、造船业、科技企业、科研机构等多个领域的合作。通过跨界合作可以实现资源共享和技术创新,推动无人船艇产业的发展。
总之,无人船艇的运用将在未来的海洋工程领域发挥重要作用。随着技术的不断升级和应用领域的不断拓展,无人船艇将会为人类带来更多的便利和创新价值。 无人船喷水推进器也叫无人船喷泵,轴流泵保持轴向流动。
无人船艇是一种具有高度自主能力的船只,可以在没有人类船员的情况下进行航行和执行任务。随着科技的不断进步,无人船艇在许多领域都展现出了巨大的作用和潜力。
一、海洋调查和测绘无人船艇可以用于海洋调查和测绘任务。它们可以长时间地自动航行,并配备有多种传感器,如温度、盐度、深度、浊度等,以收集海洋环境数据。此外,无人船艇还可以搭载高精度GPS和北斗导航系统,进行水下地形测绘和海洋资源调查,为科学研究、资源开发和海洋保护提供重要数据支持。
二、海洋污染监测和治理无人船艇可以用于监测和治理海洋污染。它们可以自动巡航在海面上,通过搭载的传感器检测污染物的种类和浓度,并将数据实时传输到岸上的控制中心。此外,无人船艇还可以搭载专门的污染处理设备,如油污处理器和垃圾收集器,对污染物进行现场处理和清理,有效降低海洋污染的程度。 推进器其结构简单,而且体积比较小,占用的面积及很小,在应用的时候较为灵活,也体现了绿色环保的概念。山西无轴推进器无人船艇发展
船舶智能化改造全自主无人艇关键技术研究创新团队获批广东省创新团队,随后到松山湖开启创业之旅。江苏高速无人船艇
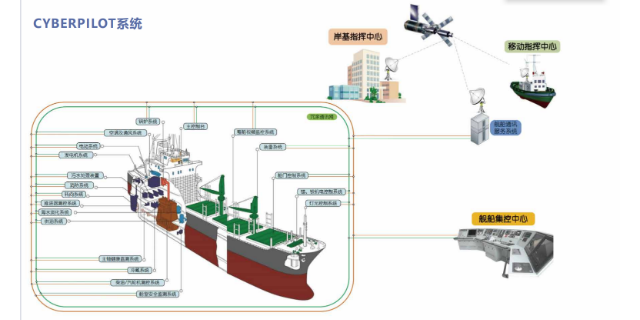
无人船艇的组成结构和工作原理是实现其自主航行和任务执行的关键。以下是无人船艇的详细描述:组成结构:无人船艇通常由船体、传感器系统、自动控制系统、通信系统、动力系统等组成。其中,传感器系统用于感知周围环境,如水温、水位、流速等;自动控制系统用于控制船体的航行和任务执行;通信系统用于与岸上控制中心进行数据传输和指令接收;动力系统用于提供船只航行的动力。
工作原理:无人船艇的工作原理主要涉及航行控制和任务执行两个环节。在航行控制方面,无人船艇依靠传感器系统获取周围环境信息,通过自动控制系统进行分析和处理,生成航行指令,控制船体按照预定轨迹航行。
在任务执行方面,无人船艇可以根据任务需求配备不同的传感器和设备,如水下探测器、水质监测器、图像采集器等,通过自动控制系统执行相应的任务。 江苏高速无人船艇
上一篇: 河北无轴推进器无人船艇怎么用
下一篇: 辽宁喷水推进器无人船艇厂家